2025 电赛 E 题
MSPM0G3507 下位机
K230 上位机
基于多传感器融合的循迹打击系统
双核心协同 · 陀螺仪精准转弯 · 视觉靶心锁定
一、作品概述
本系统设计了一套双核心协同工作的智能打击系统,通过任务解耦实现高效控制:
🚗 下位机 (MSPM0)
负责四轮循迹小车控制。完成黑线循迹、编码器里程计测量以及基于 MPU6050 的 90° 精准转弯。
🎯 上位机 (K230)
负责二维云台控制系统。通过 GC2093 摄像头进行靶心识别,解算偏移量并控制舵机将激光对准靶心。
二、系统硬件架构
2.1 下位机部分(循迹小车)
| 模块 | 型号 | 功能描述 |
|---|---|---|
| 主控芯片 | MSPM0G3507 | TI Cortex-M0+,80MHz,核心运动控制 |
| 电机驱动 | TB6612 | 驱动 4 个带编码器的直流减速电机 |
| 循迹传感器 | 4 路红外对管 | 检测地面黑线位置,输入 GPIO |
| 姿态传感器 | MPU6050 | I2C 接口,提供陀螺仪数据用于角度积分 |
| 显示模块 | 0.96 寸 OLED | 实时显示里程、角度等调试信息 |
2.2 上位机部分(云台系统)
| 模块 | 型号 | 功能描述 |
|---|---|---|
| 主控芯片 | K230 | 嘉楠科技 RISC-V,内置 KPU,负责图像处理 |
| 摄像头 | GC2093 | CSI 接口,640x360 图像采集 |
| 执行机构 | 2×数字舵机 | PWM 控制,分别负责水平 (Pan) 和垂直 (Tilt) |
| 打击模块 | 405nm 蓝紫色激光 | GPIO 控制开关,用于指示靶心 |
三、下位机核心代码解析 (MSPM0)
下位机采用 C 语言开发,核心在于陀螺仪积分算法与状态机循迹逻辑。
3.1 陀螺仪姿态解算
利用 MPU6050 的 Z 轴角速度进行积分,计算偏航角 (Yaw)。增加了角度归一化和最小角度差计算,防止过零点跳变。
C / MSPM0// 计算从 start 到 current 的最小角度差 [-180, 180]
float angle_diff(float start, float current) {
float diff = current - start;
while (diff > 180.0f) diff -= 360.0f;
while (diff < -180.0f) diff += 360.0f;
return diff;
}
// 陀螺仪积分更新 yaw
void checkout() {
int16_t accel[3], gyro[3];
float temperature;
mpu6050_read(gyro, accel, &temperature);
int16_t gz_raw = gyro[2];
// 500°/s 模式下灵敏度 65.5 LSB/(°/s)
float gz_dps = ((float)gz_raw) / 65.5f;
float dt = 0.01f; // 10ms 采样间隔
yaw += gz_dps * dt;
// 归一化到 [-180, 180]
while (yaw > 180.0f) yaw -= 360.0f;
while (yaw < -180.0f) yaw += 360.0f;
}3.2 精准转弯控制 (tm2)
采用差速驱动实现原地旋转。当陀螺仪检测到转动角度达到 22.0f(根据齿轮比换算为车身 90° 或其他目标角度)时立即停止。
C / MSPM0void tm2() {
delay_ms(30);
checkout();
yaw = 0.0f; // 清零积分,消除累积误差
float yaw_start = yaw;
delay_ms(30);
// 差速转弯:左轮正转,右轮反转
Set_Speed(0, 3000);
Set_Speed(1, -3000);
while (1) {
checkout();
float delta = angle_diff(yaw_start, yaw);
if (fabsf(delta) >= 22.0f) { // 达到目标角度
Set_Speed(0, 0);
Set_Speed(1, 0);
break;
}
delay_ms(10);
}
delay_ms(200); // 等待惯性停止
}3.3 状态机循迹算法 (tm1)
基于 4 路红外传感器的状态组合,采用分级调速策略。偏离越远,修正速度差越大。
C / MSPM0void tm1() {
IR_Module_Read();
// 情况 1 & 2: 直行 (全灭或中间两路亮)
if((ir_dh2 && ir_dh3 && !ir_dh1 && !ir_dh4) || (!ir_dh1 && !ir_dh2 && !ir_dh3 && !ir_dh4)) {
Set_Speed(0, BASE_SPEED);
Set_Speed(1, BASE_SPEED);
}
// 情况 3: 偏左 (左内亮) -> 右轮加速
else if(ir_dh2 && !ir_dh3) {
Set_Speed(0, BASE_SPEED);
Set_Speed(1, TURN_SPEED);
}
// 情况 4: 偏右 (右内亮) -> 左轮加速
else if(!ir_dh2 && ir_dh3) {
Set_Speed(0, TURN_SPEED);
Set_Speed(1, BASE_SPEED);
}
// 情况 5: 极左 (最左亮) -> 大角度右转
else if(ir_dh4 && !ir_dh1 && !ir_dh2 && !ir_dh3) {
Set_Speed(0, TURN_SPEED / 2);
Set_Speed(1, BASE_SPEED * 2);
}
// ... 其他情况兜底直行
else {
Set_Speed(0, BASE_SPEED);
Set_Speed(1, BASE_SPEED);
}
}四、上位机核心代码解析 (K230)
上位机运行 Python 脚本,利用 K230 的图像处理能力进行靶心识别,并通过查表法控制云台。
4.1 视觉几何解算
基于小孔成像模型,将像素坐标偏移量转换为实际的角度偏移量,并根据靶心在图像中的高度估算距离。
Python / K230def get_angle_offset(cx, cy):
"""计算靶心相对于画面中心的偏移角度"""
center_x = FRAME_W / 2
center_y = FRAME_H / 2
dx = cx - center_x
dy = cy - center_y
# 利用焦距参数 F_H/F_V 进行反正切计算
angle_h = math.atan(dx / F_H)
angle_v = -math.atan(dy / F_V) # Y 轴翻转校正
return math.degrees(angle_h), math.degrees(angle_v)
def estimate_distance(blob_height_pixels):
"""通过靶心高度估算距离 (mm)"""
if blob_height_pixels == 0:
return None
return (REAL_HEIGHT_MM * F_V) / blob_height_pixels4.2 智能查表控制算法
为了简化调试并提高响应速度,采用查表法替代传统 PID。根据水平和垂直角度的不同区间,返回不同的舵机调整步长。
Python / K230def compute_change_h(angle_h, angle_v):
"""根据角度偏差查表获取水平修正量"""
ah = abs(angle_h)
# 区域 1: 垂直角度较小 (目标较近或较低)
if angle_v < 13:
if angle_h > 0: # 偏右
if ah > 25: return 11
elif ah > 10: return 5
else: return 3
else: # 偏左
if ah > 20: return 2
else: return 3
# 区域 2: 垂直角度较大 (目标较远或较高)
else:
if ah > 25: return 13 # 大偏差快速修正
elif ah > 10: return 5
else: return 3
return 04.3 主循环与靶心筛选
通过密度阈值 (`density`) 筛选出空心的环形靶心,排除实心干扰物。
Python / K230while True:
img = sensor.snapshot()
if not adjusted:
# 寻找黑色色块
blobs = img.find_blobs([black_tape_threshold],
area_threshold=200,
merge=True)
if blobs:
# 关键:筛选空心靶心 (密度小于阈值)
hollow_blobs = [b for b in blobs if b.density() < DENSITY_THRESHOLD]
if hollow_blobs:
# 选择面积最大的目标
max_blob = max(hollow_blobs, key=lambda b: b.pixels())
bx, by = max_blob.cx(), max_blob.cy()
# 解算角度并控制舵机
angle_h, angle_v = get_angle_offset(bx, by)
move_servo(angle_h, angle_v, max_blob.h())
adjusted = True
done_pin.value(1) # 发送完成信号给下位机
time.sleep(0.005)五、系统联调与测试结果
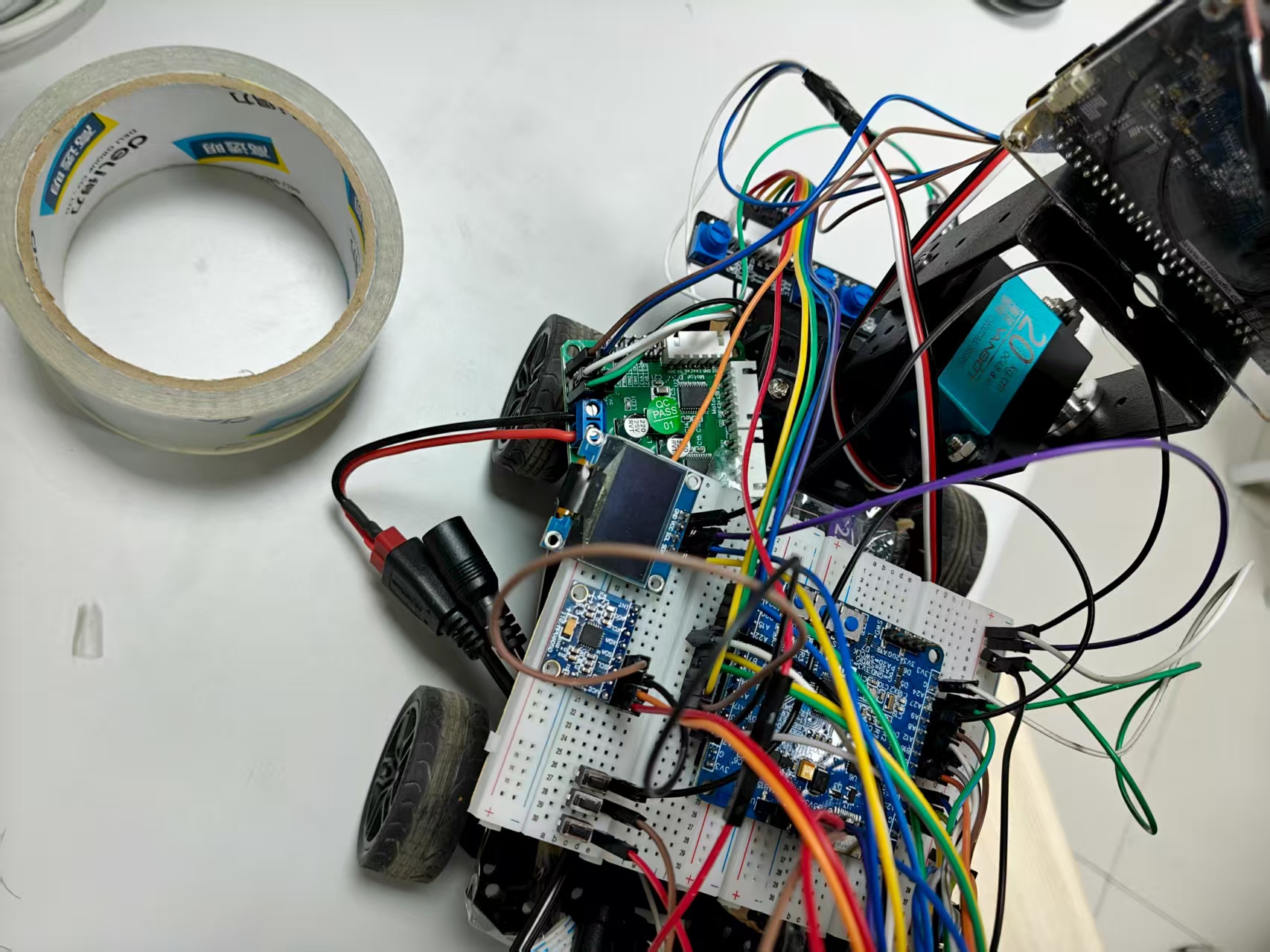
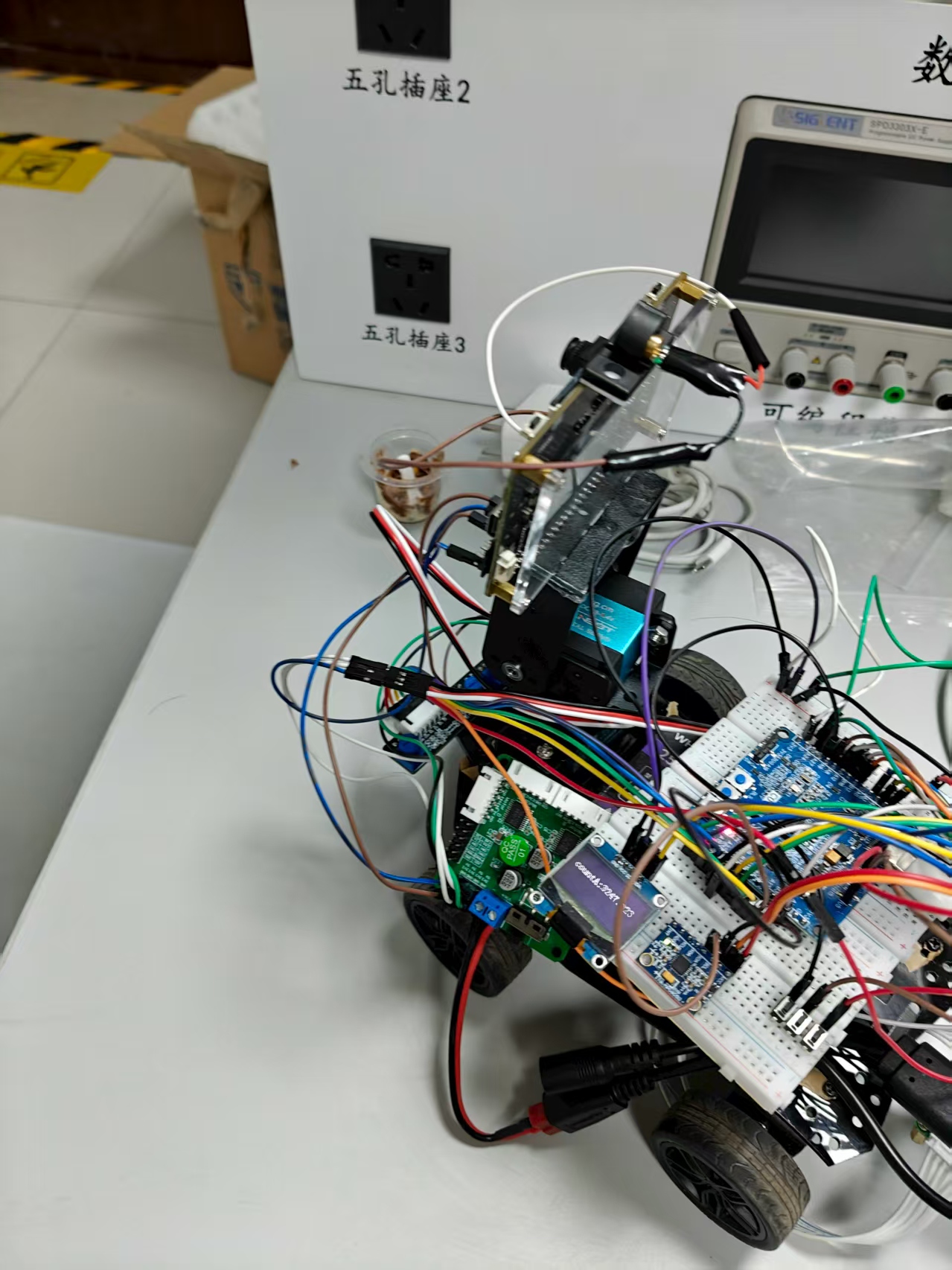
5.1 成品展示
5.2 问题与解决方案
- 陀螺仪漂移:通过在每次转弯动作前强制清零积分 (`yaw=0`),只计算相对角度,有效消除了累积误差。
- 红外误判:增加软件滤波逻辑,连续采样三次取中值,避免瞬间干扰导致小车失控。
- 识别速度慢:将 K230 摄像头分辨率降至 640x360,并优化 Blob 查找参数,帧率提升至 100FPS+。
- 舵机抖动:在 PWM 输出时增加死区补偿,并在目标附近减小调整步长,实现平滑锁定。
六、总结
本系统成功实现了双核协同的智能打击任务。MSPM0 保证了底层运动的实时性与稳定性,K230 发挥了强大的边缘计算能力进行视觉处理。两者协同工作,架构清晰,调试方便。
未来改进方向
- 引入PID 算法进一步优化循迹平滑度和云台追踪的细腻度。
- 将四路红外传感器换成八路传感器,检测将更精准
- 移植FreeRTOS到下位机,实现多任务并行处理(如同时处理蓝牙通信)。
- 在 K230 上部署轻量级深度学习模型 (如 YOLO-Fast),提高复杂背景下的靶心识别率。
- 增加 WiFi/ESP8266 模块,实现手机 APP 远程监控图传画面。
完整工程代码已开源,欢迎交流指正!
查看 GitHub 源码